142 ANTI-ROLL DEVICES FOR SHIPS
If the precessional motion of each is opposed by a moderate frictional torque, the amplitude of ship's roll will be damped.
In Fig. 115, the velocity of roll at some instant is represented by w. From Art. 36, the torque acting on the frame of G, about a vertical axis is in the clockwise direction as represented by the symbol L1, and that acting on the frame of G2 is in the counter-clockwise direction as represented by the symbol L2. As these torques are equal and oppositely directed, the pair of precessing gyro-wheels produces zero effect on the steering of the ship.
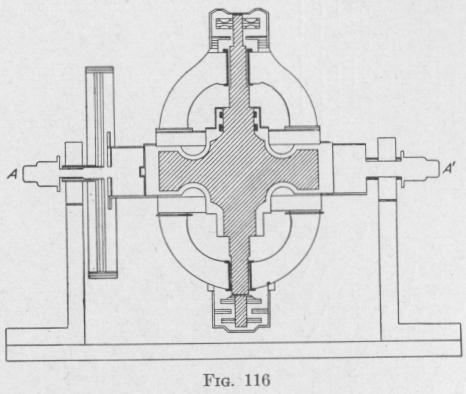
90. The Schlick Ship Stabilizer. - This consists of a gyro-wheel of great moment of inertia* spinning about a vertical axis and capable of precessing about a horizontal athwartship axis AA', Fig. 116. The precession axis is above the center of gravity of the gyro-wheel and casing. The period of the apparatus when swinging as a gyro-pendulum is made approximately the same as the period of roll of the ship in a calm sea. The inclination of the gyro-axle from the equilibrium position is maximum when the rolling ship is in its equilibrium position, and it is zero when the ship is at the end of a roll. When there is no opposition to precessing, there is a phase difference of 90 degrees between the precessional velocity of the undamped gyro-axle and the gyroscopic torque acting on the ship (Art. 89). In this case there is zero
* U. S. Patent. Schlick, No. 769493, 1904.
THE INACTIVE TYPE OF GYRO SHIP STABIILIZER 143
absorption of energy from the ship's roll and consequently no damping of the amplitude of oscillation.
To produce an absorption of energy of the ship's roll, that is, a damping of the amplitude of roll, the phase difference between the precessional velocity and the torque acting on the ship due to the precessing gyro-wheel must be more than 90 degrees. In the Schlick ship stabilizer, the phase difference is increased by means of a brake* applied to the precession axle. A considerable part of the energy of the waves is used in producing precession of the gyro-axle and then is transformed into heat at the brakes.
Professor A. Foppel has shownf that if precession of the gyroaxle be opposed by the proper frictional torque, and if the moment of inertia of the gyro-wheel about the spin-axis has the value
K, = 4) V'5 wK (99)
then, during the time of one roll, a Schlick ship stabilizer will reduce the velocity of roll through the equilibrium position to 0.283 of the value it would have when the gyro-wheel was not operating. In this equation, F is the maximum amplitude of roll without stabilizer, Fg is the weight of the ship, H is the metacentric height, K is the moment of inertia of the ship about the axis of roll, and w, is the spin velocity of the gyro-wheel.
An essential part of this device for diminishing ship's roll is the brake. The brake torque at each instant should be proportional to the precessional velocity. Schlick has used band brakes and hydraulic brakes. When the brakes are not applied, the zero precessional velocity of the gyro, wpg, and the zero angle of roll of the ship, 8, occur at the same instant, Fig. 109. Even with moderate damping they occur at near the same instant. A ship must roll through an appreciable angle before the precessional velocity of a Schlick gyro-stabilizer, and the torque thereby produced, become of sufficient magnitude to produce an effective opposition to the roll.
* U. S. Patent. Schlick and Wurl, No. 944511, 1909.
t In the appendix to an article by Otto Schlick, "The Gyroscopic Effe by Flywheels on Board Ship," Trans. Inst. Naval Architects, 1904, p. 117.
A determination of the constants of a Schlick ship stabilizer by Foppe method has been given in some detail by Professor John Perry in Natm 77, 447 (1908).
Greenhill, Report on Gyroscopic Theory, pp. 34-36.