232 NAVIGATIONAL COMPASSES
system may not move at once to the resting position proper to the new velocity but may oscillate for some time. The angle between the new resting position and the resting position corresponding to the final velocity is called the ballistic deflection. In Art. 113 it is shown that a gyro-compass will be without ballistic deflection error at the equator if the undamped period has a value given by (126). In the same Article it is shown that if the compass be moved to any other latitude, the north-south line of the sensitive element will move without oscillation to the resting position proper to the final velocity of the ship so long as the quantity
is maintained constant.
In the gyro-compasses already described, the period is adjusted to the proper value by regulating the pendulousness mx of the sensitive element. In the Anschutz and in the Arma gyro-compasses, the desired constancy of this quantity is maintained by varying the spin-velocity ws of the gyro as the cosine of the latitude varies. Each gyro of the Anschutz compass is the rotor of a threephase motor operated by a current of 330 cycles per second. By varying the inductance of two of the motor windings, the speed can be changed as gradually as may be desired from about 17,000 to about 30,000 revolutions per minute. By setting a dial for the given latitude, the gyros will have the proper angular momentum to produce the required period of vibration of the sensitive element. Details of a similar device used on the Arma gyro-compass as well as the means provided to prevent this change in spin-velocity affecting appreciably the direction of the spin-axle are given in Art. 145.
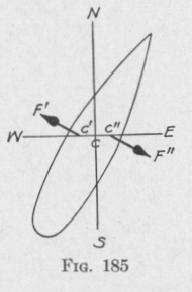
140. Avoidance of the Quadrantal Rolling Error. - Suppose that a ship on an intercardinal course carries a pendulous gyrocompass. When the ship is on even keel, the center of mass of the sensitive element of the compass is at C, Fig. 185. When the ship rolls, the center of mass of the sensitive element rotates readily about a north-south axis but not about an east-west axis. When the ship is at the end of a roll to port, the center of mass of the sensitive element has rotated to C' and is acted upon by force F'. When the ship is at the end of a roll to starboard, the center of mass of the sensitive element has rotated to C" and is acted upon by a
THE ANSCHUTZ GYRO-COMPASS 233
force F". The center of mass moves back and forth along a line perpendicular to the spin-axle.
The meridian components of these athwartship forces, produced by the shifting of the center of mass along the east-west line, produce a tilt of the spin-axle and also an azimuthal deflection when the ship is on an intercardinal heading (Arts. 115 and 117). This rolling, quadrantal or intercardinal error will be. reduced to zero
if there be no shifting of the center of mass of the pendulous sensitive element when the ship rolls. There will be only a very small back-and-forth displacement of this center of mass when the period of vibration of the sensitive element east and west is so much greater than the period of the ship's roll that the amplitude of the vibration forced upon the sensitive element is small.
In the Anschutz gyro-compass, the re
quired long period of vibration of the sensitive element about a horizontal meridian axis
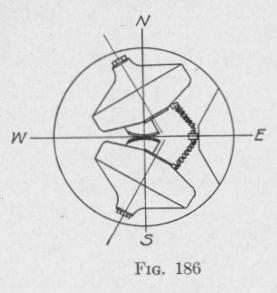
is effected by having the sensitive element comprise two gyros with the spin-axles always nearly horizontal. The principle involved will now be described. Each gyro is capable of precessing
through a limited angle about a
vertical axis. The plane of the axis
of precession is in the normal north
south plane of the sensitive ele
ment. The two gyro-casings are
connected by cams and springs so
that, at all times, the two spin-axles
make equal angles with the vertical
plane through the precession axis,
Fig. 186. The angle between the
spin-axles is always about 60 de
grees.
If a change be made in the direction of the spin-axle of a gyro
free to precess, a gyroscopic torque opposes the change. This
opposing torque is proportional to the component of the angular
momentum of the gyro with respect to an axis perpendicular to
the axis about which the spin-axle is turned. With two gyros
each of angular momentum hs and the spin-axes horizontal and
inclined 30 degrees to the meridian, there is a resultant angular