244 NAVIGATIONAL COMPASSES
control magnets FF' on the sensitive element. Also, both the sensitive element and the compass card were deflected from the meridian through an angle S, in the counter-clockwise direction. The setting of the dial rotated the line connecting the follow-up coils CC' through an angle 61 in the counter-clockwise direction away from the line connecting the control magnets FF' without changing the direction of the north-south line of the compass card. The follow-up system immediately started to rotate the pinion e, thereby turning both the compass card and the phantom geared to it through the angle S, in the clockwise direction, that is, till the line connecting the follow-up coils CC' was brought again into coincidence with the line connecting the control magnets FF'. By this rotation of the compass card, the north-south line was brought into the meridian. The meridian-seeking axis of the sensitive element is still at an angle S, to the meridian.
145. Prevention of the Ballistic Deflection Error. - A gyrocompass will be without ballistic deflection error at the equator if the undamped period has a value given by (126). If the compass be moved to any other latitude X, the compass will continue to be without ballistic deflection error if
THE ARMA GYRO-COMPASS 245
till these two torques balance one another. The angle of turn is less than one revolution.
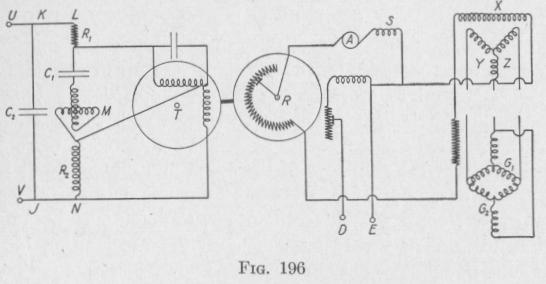
The two field coils of the torque motor are connected to a tuned resonant circuit JKLN consisting of a variable inductance M, resistance R, and fixed capacitances C, and C2. A choke coil R2 prevents a too rapid increase of current. The resonant frequency of the circuit is inversely proportional to the square root of the inductance. It is possible to vary the frequency of this circuit within wide limits, and consequently vary the resistance of the rheostat R, the current in the series field coil S of the direct
be maintained constant (Art. 113).
The desired constancy can be maintained by varying the spin velocity ws as the cosine of the latitude varies. The spin-velocity of the gyros of the Arma compass is changed by adjusting the speed of the motor generator that energizes the stator coils of the two gyro-motors. In Fig. 196, D, E are the terminals of the direct current motor that rotates the three-phase generator X YZ which operates the two gyro-motors G, and G2. The armature A of the direct current motor is connected in series with a variable rheostat R. The rotatable arm of the rheostat is keyed to the shaft of a small reversible two-phase " torque motor " T. The rotor of the torque motor consists of a squirrel cage armature without commutator or slip rings. When the two stationary coils of the motor are traversed by two alternating currents in different phase, a rotating magnetic field is developed which produces a torque on the rotor. Rotation of the rotor is opposed by the torque developed by a spring, one end of which is fastened to the shaft and the other end attached to a fixed support. The rheostat arm turns
current motor, the speed of this motor, the electromotive force of the alternator X YZ and therefore the spin-velocity of the two
gyros G1 and G2.
In setting the dial fastened to the variable inductance M for a particular latitude, the resonant frequency of the tuned circuit is made to correspond to the speed at which the motor generator should run when the compass is at that latitude. If the speed is too low, the reversible torque motor T will turn in the direction to reduce the resistance of the rheostat R. If the speed is too high, the reversible motor will turn in the opposite direction, thereby increasing the rheostat resistance. At the correct motorgenerator speed, the potential difference at the terminals of the two field windings of the torque motor are in phase and the torque motor stops.
A tilt of the spin-axle of a gyro-compass is necessary in order that the spin-axle may remain in the meridian when at any latitude either north or south of the equator (Art. 106). In Art. 109 it has been shown that if the spin-velocity of a gyro-compass be con-