264 GYROSCOPIC STABILIZATION
GYROSCOPICALLY STABILIZED MONORAIL CARS 265
with vertical axle tilts whenever the velocity of the car is changed either in magnitude or direction. The tilt is greater when the car moves around a curve in the direction opposite that of the spin of the gyro-wheel than when it moves around a similar curve in the same direction as the spin of the gyro-wheel.
160. The Effect of a Change in Linear Velocity on the Stability of a Monorail Car that Carries a Single Gyroscope with Horizontal Spin-Axle Transverse to the Car. - When the car goes
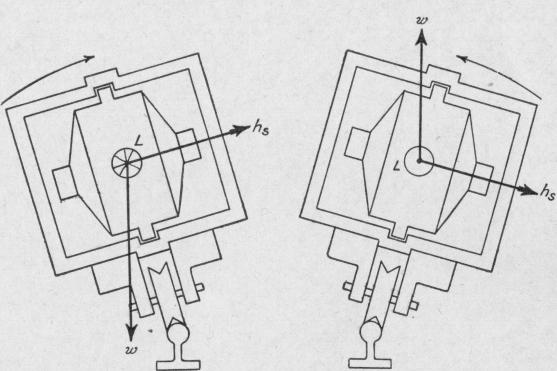
around a curve and the gyro is not spinning, the car tilts away from the center of the curve. When the car is making a right turn, if the direction of spin of the gyro is as indicated by h,, Fig. 213, a torque acts on the gyro in the direction indicated by L (Art. 41). Since the gyro cannot turn, relative to the car, about the axis of this torque, the car is acted upon by a torque which tends to diminish the tilt away from the center of the curve. If the direction of spin of the gyro were reversed, the car would be acted upon by a torque tending to increase the tilt away from the center of the curve.
When the car is making a left turn, if the direction of spin of the gyro is as indicated by h,, Fig. 214, a torque acts on the car which tends to diminish the tilt away from the center of the curve. If the direction of spin were reversed the car would be acted upon by a torque tending to increase the tilt away from the center of the curve.
161. Methods for Increasing the Kinetic Stability of a Monorail Car while the Car is Going around a Curve. - A monorail car can be maintained kinetically stable if at every instant the precessional velocity of the statically unstable gyro is of the proper value and in the proper direction. In order that a curve may be traversed safely by a monorail car, the precessional velocity of the spin-axle must have a value that is different from that required when the car is moving along a straight level track. The precessional velocity can be changed by applying a torque about the axis of precession. A variable torque may be applied by an outside motor as in the case of the active type of ship anti-roll device (Art. 93). A variable torque may be produced also by varying the degree of statical instability of the gyro system.
Statical instability of the gyro system can be produced either by having the point of support below the center of gravity or by applying springs that tend to pull over the system. The free precession of the gyro-axle and the tilting of the car are slower when the angular momentum of the gyro is increased, and quicker when the degree of static instability of the gyro system is increased.
Mr. Peter P. Schilovsky, who has devoted much attention to monorail cars, produces the required degree of kinetic stability of the car while it is making a turn by altering the degree of static instability of the gyroscope according to the angular velocity of tilting of the car.*
Another method for avoiding any change in the degree of kinetic instability of a monorail car when changing the direction of motion is to employ two gyros spinning in opposite directions about axes which normally are perpendicular to the track. The normal direction of the spin-axles may be either vertical or horizontal. A view of the first case as seen when looking down on a horizontal plane is represented in Fig. 215. The two gyro-casings, with the gyro spin-axles vertical, are represented by G and G'. Suppose that, owing to motion around a curve, wind pressure on the car, ununiform loading, or any other cause, the side A of the car is moved downward. Torques L and L' act on the gyros G and G', respectively. When spinning in the directions indicated by the symbols h, and he', the gyros will precess in opposite directions as indicated by wp and wp'. The two gyro-casings are coupled together by two gear segments g and g' so that the precessional
* Schilovsky, The Gyroscope: Its Practical Construction and Applications, p. 224, Spon and Chamberlain, London and New York.
FIG. 213
FIG. 214