I
f
i
266 GYROSCOPIC STABILIZATION
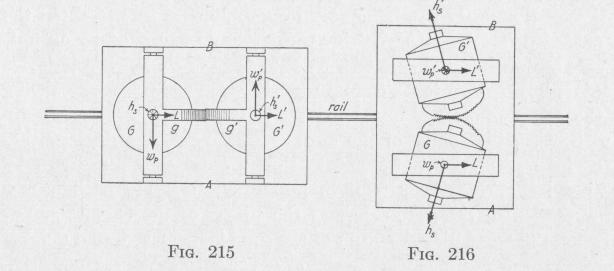
speeds at any instant are equal in magnitude. If, now, these precessional speeds be accelerated to the same degree, equal torques will be developed on the two gyros and on the attached car in directions opposite those indicated by L and L' (Art. 36). If the angular momenta of the gyros and the accelerations of the precessional velocities be sufficiently great, the car will be righted.
The case in which the spin-axles are normally horizontal is
represented in rig. 2ro. As in the precearng case, the two gyroaxles are coupled together by two gear segments so that the precessional velocities are equal in magnitude and opposite in direction. Suppose that owing to motion around a curve, or any other cause, the side A of the car is moved downward. Then the two gyro-axles will precess in the directions indicated by wp and wp', respectively. If, now, these precessional velocities be accelerated to the same degree, equal torques will be developed on the two gyros, and on the attached car, in the directions opposite those indicated by L and L', Fig. 216. If the constants of the gyros are of the proper value, the car will be righted.*
162. The Schilovsky Monogyro Monorail Car of 1915. - Consider a monorail car on which is mounted a single statically unstable gyro spinning about an axis that normally is vertical and capable of precession about a horizontal axis transverse to the rail. When the car tilts to one side, the spin-axle of the gyro precesses either forward or backward. Suppose that a motor accelerates the precession. There is now a torque which opposes the present tilting of the car and tends to make the car tilt in the opposite direction (Art. 158). This overbalancing torque sets up a counter
* Cousins, " The Stability of Gyroscopic Single Track Vehicles," Engineering (1913), pp. 678, 711 and 781, is a noteworthy analytical treatment.
GYROSCOPICALLY STABILIZED MONORAIL CARS 267
active force which tends to rotate the spin-axle in the direction opposite to the precession and beyond the vertical position. When the car leans in the direction opposite the original tilt, the direction of precession is reversed. Suppose that now the speed of precession in this direction is accelerated by torques which the motor applies to the gyro. The above series of operations is repeated and the car oscillates from one side of the vertical to the other. If the impulses on the gyro due to the motor are applied at the proper times, are in the proper directions and are of the proper strengths, the motor will absorb energy from the oscillating car,
damp the amplitude of the oscillations and cause the car to become kinetically stable.
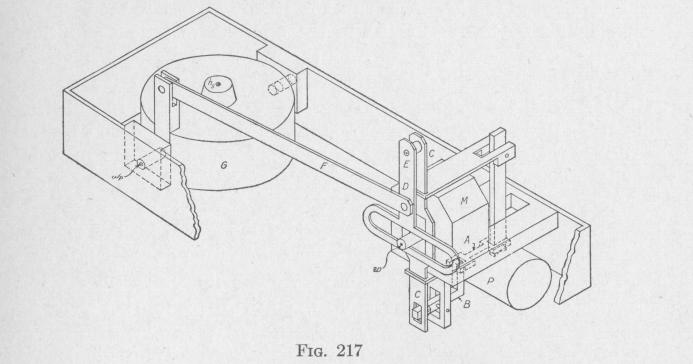
The device for stabilizing monorail cars proposed in 1915 by Schilovsky* is represented diagrammatically in Fig. 217. In this much simplified diagram, the various parts of the device are not drawn to scale, the gyro being relatively much larger than here indicated. The gyro G spins about an axis that normally is vertical. It is mounted so as to be statically unstable and capable of precessing about a horizontal axis transverse to the rail. The shaft of the precession motor M rotates continuously with constant speed.
Suppose that the precession motor shaft rotates in the clockwise direction and that the direction of spin of the gyro is as indicated by the symbol h,. When the car tilts toward the reader,
* TI. S. Patent. Schilovskv. No. 1137234. 1915
I
i